目前我国桥梁水下结构的检测仍让处于起步阶段,甚至在相关规范中没有明确的规定和要求。既有桥梁水下墩台、基础的冲刷以及结构的外观缺陷如何进行检测和评估也是桥梁检测的重要内容,随着技术的进步这也是我们桥梁管理、养护应该关注的问题。我们近几年也经常能看到“蛙人”对桥梁水下结构检测的新闻,其实“蛙人”也就是我们常说的潜水员。潜水员对桥梁进行检测通过潜入水下通过触摸、观察等手段来实施检测,而检测人员通过潜水员的描述来判断桥梁水下结构的病害和缺陷。由于桥梁检测的专业性很强,因此潜水员的检测有点类似于“盲人摸象”。本文对桥梁水下结构的检测方法进行简单的总结,以起到抛转引玉引的作用来推动我国桥梁水下检测技术的发展。
一、水下视频检测的方法
水下摄像系统一般包括水下摄像机/摄像探头、传输线缆和图像采集设备,水下摄像机和连接线缆要求具有水密性。水下视频检测系统检测时将水下摄像机/摄像探头下放至水下待检测的部位,水下摄像机连接的数据线缆将图像传输至图像采集设备,通过图像采集设备来显示摄像机在水下的位置以及实时采集的图像。在实施桥梁水下检测时图像采集设备可以进行全过程的录像,检测人员可以通过视频播放来进行后续结构病害的分析,此外在检测时发现结构的病害可以进行视频的截屏,并记录病害的位置以及截屏病害图像的编号。图1是某桥梁水下墩柱采用水下视频检测的截图,图中显示摄像机下水至水下的距离为8.7m,从图中能明显看出墩柱表面有大量的附着物。

图1 墩柱视频检测的截图
水下视频检测系统检测桥梁时可以采用以下几种方法:(1)以船只或皮划艇为载体,将图像采集设备放置在船只或皮划艇上,行至测试位置将水下摄像机通过绞车逐渐下放至水中检测;(2)水下视频检测系统通过潜水员在指定位置下潜,携带摄像机对桥梁水下结构进行检测;(3)采用水下桥梁结构检测时,水下视频监测系统采用水下机器人搭载的方式(见图2)。

图2 水下机器人视频系统
二、水下机器人检测的方法
前面在介绍水下视频系统时介绍了机器人搭载视频系统的方式,此外水下机器人检测桥梁水下结构时还可以搭载超短基线定位系统、单波束声呐、多波束声呐系统进行水下结构物的扫描、定位和测量工作。
采用水下机器人搭载视频及多波速二维扫描声纳扫描成像的方法进行水下结构物的检测。该系统主要功能应包括以下几个方面:
1、水下机器人(ROV):能够下潜深度满足水下检测要求,能够通过控制台控制机器人的运动,机器人应采用观察级机器人;
2、机器人应配备导航定位系统,目前通长采用超短基线水声定位系统。
3、视频监控系统:该系统主要搭载在机器人上对结构物的进行监测,视频系统能通过控制系统的显示屏进行适时显示,并按要求能进行控制拍摄结构损伤、缺损的照片或视频资料;
4、二维多波速声纳:在水质混浊或想获得结构物缺损详细资料时,声纳对结构物进行二维扫面,对结构的缺损进行相对精细的扫描。
5、水下机器人应配备机器手 水下检测可能会在水中遇到复杂的检测环境,配备基本的机器手可以在检测过程中进行必要的控制和操作。
水下机器人一般包括水下潜器、脐带缆、水面控制台、附件工具等几个部分(见图3)。水下潜器包括电子仓、起落架、推进器、照明灯、视频摄像系统等部分;水面控制台包括控制笔记本电脑、液晶显示屏、完整系统控制软件、USB手动控制器等部分。目前常见的水下机器人的结构见图3。

图3 水下机器人系统
三、水下三维激光扫描系统
目前,虽然水下激光扫描测量系统的作用距离还比较近,但其百倍于声纳的分辨率使得该革命性的技术的应用前景非常广阔,国外已经广泛用于水下建模、仿真、目标重建、水下结构检测、大坝桥梁安全评估、海洋油气、核电站检测、管道变形检测等领域。水下激光三维扫描产品目前最好的产品水下激光扫描仪精度能达到mm级,但其测试距离距结构物距离较近,测试距离在1~5m,而且测试的点云数据在构建实体模型需要通过CAD或其它专用软件进行处理。
通过三维激光扫描仪安放在待测桥梁结构物附近的不同的测站进行三维扫描,并将不同测站的数据拼接进行点云数据的建模可以实现对结构物的检测。三维激光扫描技术在实际桥梁水下结构的应用案例较少。图4为三维激光扫描水下结构物的结果,左侧为水下结构物的实际照片,右侧为采用三维激光扫描生成的扫描图。
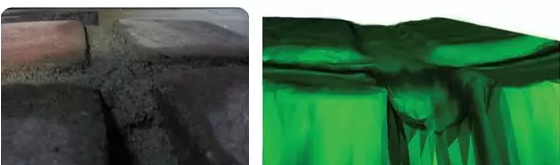
图4 水下结构物激光扫描结果对比图
四、声呐检测技术
目前国内外水下目标声纳探测技术已经有很大的进步,出现了很多不同类型、功能各异的声呐,其中具有高测量效率、高测量精度、高分辨率的多波束勘测技术适合于大面积的水下测绘作业。侧扫声纳也是人们常用的水下探测工具。它分为低频侧扫声纳、高频侧扫声纳和双频侧扫声纳。低频侧扫声纳非常适合于对水下管线、大推进器、沉船等进行搜索定位。高频侧扫声纳可提供高分辨率的图像,尽管其作用距离比低频侧扫声纳近一些,但较低频系统能更详细地显示目标的细微特征,双频侧扫声纳同时具有低频系统的远距离和高频系统的高精度两个优点。此外还有合成孔径声呐扫描技术也可以用于水下结构物的检测。
主动声呐的原理是利用发射基阵向水中发射声脉冲,通过这些脉冲而产生的回声对水下目标进行测距、定位以及识别。水下机器人利用搭载的声呐对水下桥墩进行检测,将机器人游到两桥墩之间进行360°扫描,并且尽量使机器人静止不动。如下图5为某桥采用机器人搭载声呐扫描的图像,通过对图像进行分析可以对结构物的病害情况进行分析。
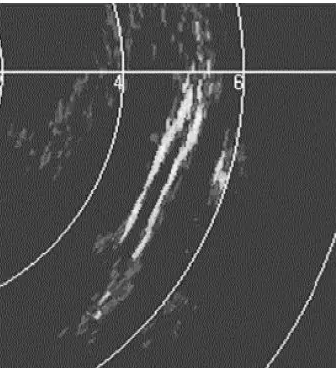
图5 某桥墩柱声呐扫描图像
此外三维声呐扫描成像检测技术可以通过船舶将声呐扫描系统随三角架安放在水下桥梁待测结构物的合适位置进行扫描测量,从而对桥梁结构进行检测。三维全景成像声纳可生成水下地形、结构和目标的高分辨率图像。声呐采用紧凑型低重量设计,便于在三脚架ROV上进行安装,只需触动按钮,三维扫描声纳就会生成水下景象的三维点云。扫描声纳头和集成的云台可以生成扇区扫描和球面扫描数据。有史以来第一次,在水下,甚至在低照度或者零可见度的水下环境,我们可以获得陆地三维激光扫描一样的图像。而且,这种图像可以与传统的激光扫描图像无缝拼接。图6~图9为桥梁下部结构采用声呐进行扫描成像的过程图。
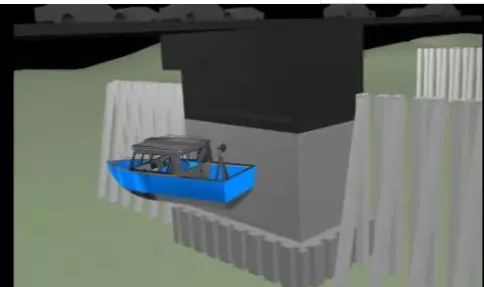
图6 测量船就位
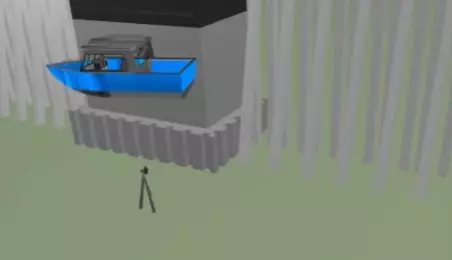
图7 声呐系统安放就位
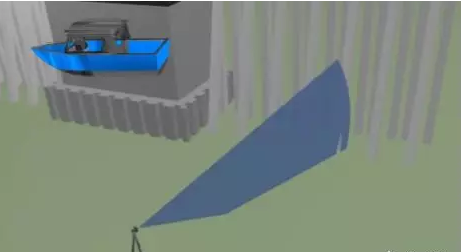
图8 声呐系统扫描工作
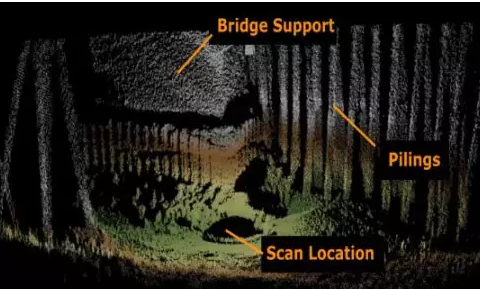
图9 声呐三维扫描成像结果





