前文研究结果可得知,主元统计方法是将实际测量数据投影到统计模型的相应子空间,其产生的残差可以用来判断是否出现故障,但主元分析法是属于单一尺度或频率的建模方法,面对故障信息的多尺度特性具有其局限性;小波是一种时间-尺度的分析方法,具有多分辨率解析的特点,又由于小波对突变信息的敏感,决定了利用小波作为工具对故障进行检测的优点,但是小波在对故障信息进行精确定位和评价的时候其算法非常复杂,需要结合其他算法来完成故障诊断。 因此本文提出的模型是建立在以上两种算法在故障诊断中表现出的优势和局限性,同时考虑到噪声对故障诊断的干扰而设计的。
1 模型基本思路
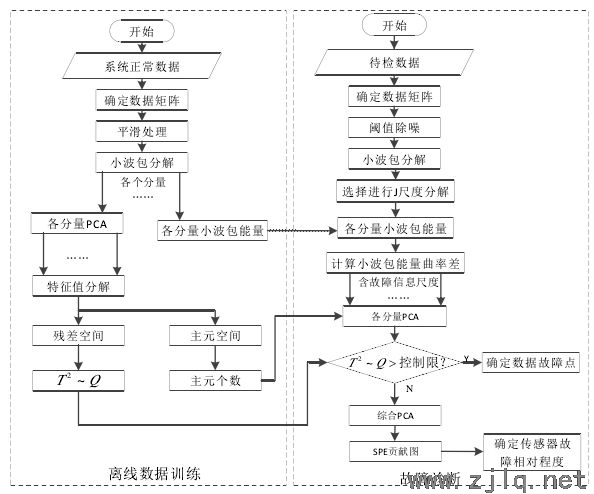
基于数据驱动的桥梁监测数据故障检测模型是对桥梁监测过程中的数据进行预处理,其目的是完成数据的除噪及故障诊断。模型主要分成两个模块:离线模块、在线模块。其中离线模块是利用正常数据对该模型进行预处理,通过该过程可以确定小波包尺度参数、主元分析主元个数、等参数;在线模块是利用离线模块所计算的各项参数,对在线数据进行实时监控,去除噪声干扰,最终完成数据故障诊断。
如图4.10所示,在离线模式中,模型首先利用历史正常数据进行预处理,利用小波包对数据进行J层分解,计算每一尺度上的各分量的能量曲率
,将每一尺度上的各分量数据进行主元分析建模,选取合适的主元个数,将数据空间分解为相应的主元空间和残差空间,计算每个尺度上各分量的T2~Q统计量的控制限。
在线模式下,首先对数据进行小波阈值除噪,参照离线模式下计算出的尺度参数,对数据亦进行尺度为J的分解,对每该尺度上的每一个小波包分量计算其能量曲率
,计算每个尺度上的曲率差
,根据设定的阈值,判断故障是否发生,选择有故障发生的分量进行主元分析,根据离线模式得到的T2~Q控制限来确定数据故障发生的位置和大小。最后将所有数据再进行主元分析,得到二维贡献图,确定故障点是由于哪些传感器导致的及其严重程度。

2 模型算法步骤
数据故障诊断的主要任务是对数据发生故障所在位置和大小进行判断和定位,详细的算法过程如下,其算法流程图如图4.11所示:
Step1:输入正常数据矩阵X,设定数据窗口大小为2n,n为多元变量维数。
Step2:利用小波包变换对数据矩阵X每一行,及每一个变量进行尺度为J的分解,计算各个尺度下的小波包能量曲率值。
Step3:在每一个尺度上建立主元分析建模,计算该尺度下的主元个数,计算T2~Q统计量的控制限。
Step4:输入系统的在线监测数据,进行小波阈值除噪,其重构结果参照离线模式下 Step2中对应的分量以及该分量的最大尺度,对信号进行小波包分解。
Step5:计算该尺度上的每一个分量的小波包能量曲率值。与该尺度下的离线数据小波包能量曲率值相减,获得该尺度的小波包分量能量曲率差曲线。
Step6:选定出现故障的分量或感兴趣的分量,在该尺度上进行与相应离线模式下相同的主元建模,建立主元空间与残差空间,利用计算好的T2~Q统计量的控制限判断该分量下的故障发生的详细位置和大小。
Step7:重复 Step4~Step6。循环处理数据矩阵 X 下的每一个分量,计算T2~Q统计量,计算每一分量下的数据故障的详细位置。
Step8:对所有数据进行主元分析,绘制SPE二维贡献图,确定发生严重故障的传感器编号。
说明:本章分析了故障信息在信号中所体现的多尺度性和不确定性,在研究了小波包能量分析的方法和基于PCA的故障检测原理后,分析两种算法在故障检测的优缺点,提出了一种基于小波包能量曲率分析并结合PCA的故障检测模型。该模型结合了的小波阈值除噪,将除噪后的信息进行多分辨率分析,得到每一个尺度下的各个分量的小波包能量,比较在线数据或待测数据在同一尺度下的各个分量的小波包能量,为了能够更有效地比较出能量出现的差异点,文章提出了通过计算小波包能量曲率差来对故障信息进行基本检测。将发现故障的分量进行PCA模型分析,可以确定该分量下数据出现故障的准确位置。再利用PCA对所有数据进行建模分析,绘制SPE二维贡献图,可以直观的比较传感器的故障程度。





