
随着国民经济的迅速发展和城市化进程的加速,中国基础设施和交通路网建设不断扩大和完善,桥梁逐渐成为现代交通不可或缺的重要组成部分,对于人们的生产和生活发挥着越来越重要的作用。据交通运输部统计,“十三五”期间中国建成铁路桥梁14039座、总里程8864.1公里;截至2022年底,中国公路桥梁数量已达96.11万座,位居世界首位。我国已从名副其实的交通大国阔步迈向交通强国。
在复杂恶劣的外界环境及载荷的长期作用下,大型基础设施不可避免出现损伤积累,特别是桥墩的损伤会给整个桥梁的完整性和安全性造成严重影响,若不能及时发现其病害并进行干预,很有可能会引发桥梁的坍塌事故。通过对桥墩的病害检测,可以及时发现桥墩的缺陷和损伤,并采取修复或加固措施,延长桥梁的使用寿命,降低维护成本,提高桥梁的经济效益和社会效益。同时能够对桥墩的结构安全进行评估,为桥墩的维护和管理提供科学依据。
桥墩表观病害检测方法主要包括人工检查法、无人机巡检法与爬壁机器人检测法。人工检查法是通过检测车的吊篮或桁架装置将检测人员及设备送到桥墩附近进行观测,此方法会耗费大量人力物力,存在检测精度低、效率低下等缺点。而无人机巡检法在进行桥墩表面病害检测时因受到拍摄距离的限制,存在无法平稳悬停与续航的问题。现有的爬壁机器人在病害检测过程中仍然需要人工进行机器人的运动控制或路径规划,无法保证其运动精度。在桥墩表观病害智能无损检测中,目前尚无稳定、高效的病害检测系统,严重制约着桥墩病害检测技术的进步。因此,急需研发新型桥墩病害检测系统,改进和解决目前桥墩病害检测的不足。在传统机器人动力学的基础上,本文结合多足协同控制算法与机器视觉,构建了墩柱结构环形可重构攀爬作业检测机器人,提出了基于环形视觉扫描的桥墩全域病害图像获取新技术,研发了相关样机与产品,有效推动了我国桥墩病害检测技术的进步。
墩柱结构表观病害检测机器人新技术
机器视觉是使计算机系统能够模拟和理解人类视觉系统的学科。它结合了计算机科学、图像处理、模式识别和人工智能等多个领域,旨在开发算法和技术,使计算机能够感知、分析及理解图像或视频数据。
基于以上原理,长安大学的一支研发团队研发了一种墩柱结构环形视觉扫描攀爬作业检测机器人系统(以下简称墩柱攀爬检测机器人),设计了可重构环形框架机器人,并根据其特点,开发出多足协同运动控制平台,保障环形框架机器人的平稳爬升,最后搭载多模式病害图像获取系统,实现了对桥墩病害的非接触、全域、高效检测。
墩柱攀爬检测机器人系统主要由环形框架机器人本体、多足机器人控制系统、多模式病害图像获取系统、信息交互系统组成,系统总体框图如图1所示。环形框架机器人本体包含可重构环状架体以及多个爬行机构,它是病害图像获取系统的载体,是整个系统的结构支撑;多足机器人控制系统通过多足协同控制算法,为每个爬行机构分配速度,保证机器人能够平稳爬升;多模式病害图像获取系统为多通道图像采集单元、环带面阵相机扫描单元及环带线阵CCD扫描单元,可实现对病害图像的高清获取;信息交互系统包含系统工作模式及相关工作参数的设置,实现整个检测系统的协调控制;图像处理与病害识别系统包含对病害图像的校正,病害的识别与量化,完成整个桥墩表观病害的数字化建档。
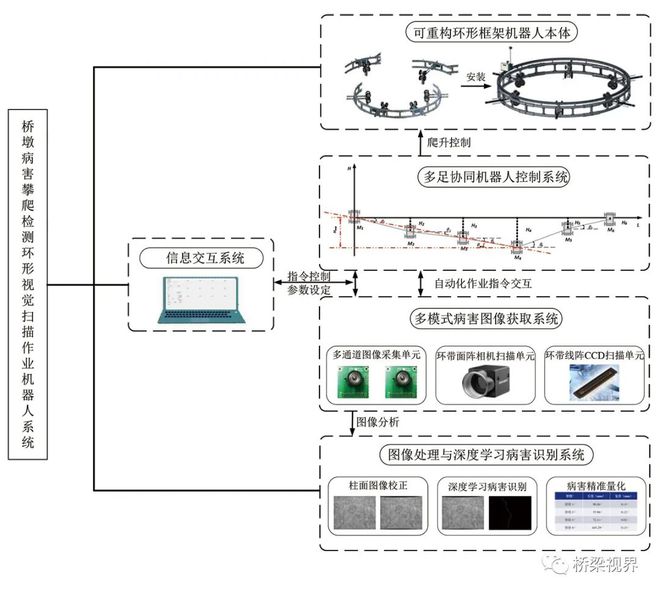
图1 环形视觉扫描攀爬作业检测机器人系统总体框图
墩柱攀爬检测机器人系统具有如下技术特点:
1.便捷性好。环形框架机器人采取分体式结构的设计,保证机器人拆卸与运输时的便捷性。
2.适应能力强。可以实现对直径1.2m-1.5m、柱体上下直径变换≤70mm范围内所有墩柱结构的检测。
3.检测效率高。以10m桥墩为例,进行一次无盲区检测,时间不超过40分钟,且系统具备自动化作业能力。
4.检测精度高。可实现0.1mm精度级别的病害检测。
5.定位误差小。位置定位误差垂直方向不超过±5cm,水平方向不超过±5mm。
6.通讯能力强。机器人与地面上位机之间的通讯距离≥500m。
7.病害识别速度快。网络模型识别病害速度快,可达20张/ s。
基于机器人动力学与机器视觉的墩柱攀爬检测机器人系统结构简单、安装方便、抗干扰能力强、检测精度高。系统可以兼容大多数墩柱结构的检测,包括直径并不统一的墩柱结构。在图像采集系统安装了补光灯板,在采集图像时会自动开启,不受光线的限制,可实现全天候、恶劣天气下的桥梁病害的检测。采集的图像通过SD卡保存至工控机内,当检测结束后可拆卸下来,便于后期的图像处理与分析。
工程应用
墩柱攀爬检测机器人
性能测试
为验证作业机器人控制系统的可靠性,在西安市浐灞区广运桥进行了墩柱攀爬检测机器人性能测试,包括机器人的爬升平稳性测试、爬升高度的精准性及爬升速度测试。驱动环形框架机器人运动,通过计算各个从电机相对于主电机的高度偏差来测试机器人的爬升平稳性。通过比较环形框架机器人的目标爬升高度与实际爬升高度来测试爬升高度的精准性。现场组装如图2所示,机器人性能测试实验如图3所示。

图2 现场组装

图3 机器人性能测试实验
测试结果表明,机器人爬升过程中,各个从电机相对于主电机的高度误差均在±5cm内,没有出现倾斜程度过大的情况,且运动控制平台会对机器人运行姿态进行实时纠正,实现了机器人的平稳爬升。环形框架机器人实际爬升高度有时略小于期望爬升高度,但误差最大仅为3cm,爬升10m高的桥墩进行全域图像采集的总时间不超过40分钟。实验表明视觉扫描检测机器人爬升过程稳定,爬升速度快,测试精度高,极大地高了桥梁检测的工作效率。
病害图像采集及病害
识别测试
寿春淮河特大桥位于安徽省淮南市,全长11.84公里,其中主桥长440米,最大跨度200米,是目前安徽省内跨度最大的矮塔斜拉桥。寿春淮河特大桥部分墩柱出现大幅度表观病害,使用视觉扫描检测机器人进行了病害图像采集测试与裂缝普查检测,在软件端实现对被检测桥墩的实时图像显示与存储。病害检测上位机软件界面如图4所示。
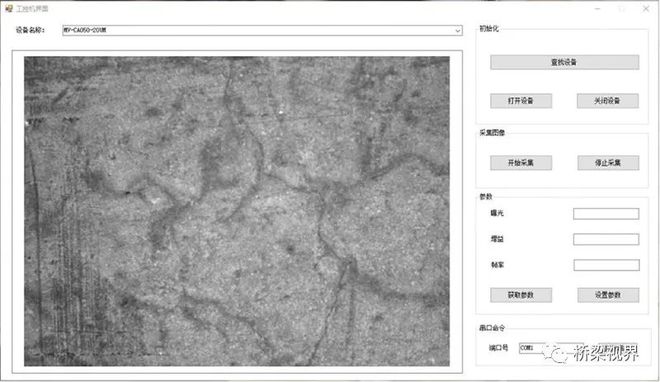
图4 上位机软件界面
测试结果表明,攀爬机器人系统能将采集到的图像按位置信息保存在工控机中。针对庞大的桥墩表观病害图像,通过构建墩柱结构表观病害数据集来训练深度学习病害识别模型。经过训练后的网络模型可以精准地识别桥墩图像中的病害,并辅以图像处理算法进行病害的精准量化,并在软件端实现了被检测桥梁病害的在线识别与数字化建档。图5为桥墩病害识别系统软件端,图6为桥墩病害识别结果。
图5 桥墩病害识别系统软件界面
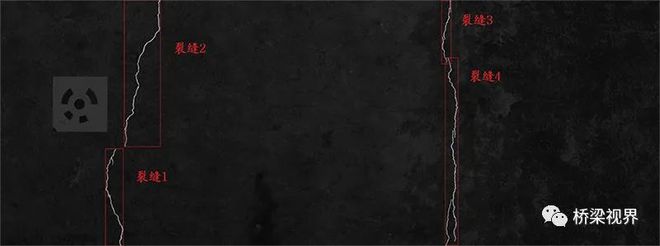
图6 桥墩病害识别结果
测试结果表明,基于深度学习与图像处理的病害智能识别与量化系统,可以精准、快速地识别出桥墩表观病害与数字化建档。
综上所述,墩柱攀爬检测机器人系统能够实现桥墩表观病害图像的全域采集,基于深度学习与图像处理的病害智能识别与量化系统,可以精准、快速地识别出桥墩表观病害与数字化建档。墩柱结构环形视觉扫描攀爬作业检测机器人系统为未来大型基础设施的信息化提供了基础,对提高墩柱结构的养护效率,保障墩柱结构的安全具有重要意义。
产品优势
基于机器人动力学与机器视觉的墩柱攀爬检测机器人系统,实现了墩柱结构表观图像全域采集,为墩柱结构表观病害实时动态检测提供一种新的手段。该技术具有稳定性好、实时性高、精度高等优点,安装方便、成本低等特点。
建立在深度学习与图像处理基础上的病害智能识别与量化系统,实现了病害图像识别和分析,并进行数字化建档。该技术具有病害识别速度快、病害精度高等特点,为未来桥墩数字孪生模型的构建及病害全生命周期演化追溯的研究奠定了坚实的基础。
目前,墩柱结构环形视觉扫描攀爬作业检测机器人系统已在国内大型桥梁工程的病害检测和周期性养护中推广应用,其优良的病害检测效果与性能指标得到应用单位的高度认可,具有广阔的工程应用前景和技术推广价值。
本文刊载 / 《大桥养护与运营》杂志
2023年 第3期 总第23期
作者 / 王会峰 赵煜 杜浩
作者单位 / 长安大学





