刘妍1,孙海丽2
(1.自然资源部第一航测遥感院,陕西西安710054;2.首都师范大学,北京100048)
摘要:无控制方式的移动激光隧道检测系统能获得高质量的三维点云数据,能对隧道及周边实现全覆盖移动扫描,在露天或隧道内都可以正常使用,相比集成惯导的移动轨道扫描系统,大大降低了成本,提升了外业检测效率。采用移动隧道检测系统对天津地铁某区间进行安全检测,通过获取隧道全息全断面数据,进行隧道点云数据采集、断面变形解算(全断面变形分析和收敛直径计算)、病害提取,生成隧道内壁和轨道影像、漫游视频,用于对隧道断面、限界、病害等信息进行全方位的分析,生成多种格式成果,为移动激光扫描技术在地铁隧道中的应用提供借鉴。
关键词:隧道安全检测;移动激光隧道检测系统;数据分析;点云数据;正射影像
1.引言
隧道几何结构安全状况直接影响隧道的使用性能,对隧道结构的状态进行监测、检测与维护整治尤为重要。由于城市轨道交通运营维护期间天窗时间短,隧道检测效率、检测数据处理精度及有效性都将影响轨道交通的正常运营,只有提高和长久保持隧道结构的强度和稳定性,对隧道及时进行变形检查和维护,才能满足列车快速、平稳、舒适、安全的运输要求。
目前,隧道变形监测主要采用全站仪或三维激光扫描测量。基于全站仪的自动变形监测方法,精度可靠,在实际工程中的应用仍然比较广泛。全站仪自动变形监测测量通过全站仪测量隧道环片标志点,或采用无棱镜反射方式测量,可实现全自动化测量,监测精度虽然较高,但效率较低,成本较高,而且测量点位密度较稀疏,只能选择部分断面进行检测,不便于进行全断面变形检测。
三维激光扫描测量因其获取数据速度快、点密度大精度高、使用简单方便等优点,将成为隧道检测的主要技术手段。
Leica、Amberg、武汉汉宁轨道交通技术有限公司推出了移动轨道扫描系统,集成了CNSS、IMU、激光扫描仪、里程计等传感器,能对轨道及周边实现全覆盖移动扫描,在露天或隧道内都可以正常使用,并为竣工分析提供测绘级精度的三维点云,但要求外业扫描过程中要联测控制点。首都师范大学研制的无控制方式的移动激光隧道检测系统,无需集成GNSS和惯性导航系统,仅借助激光扫描仪在移动轨道小车平台上匀速运行,便可获得高质量的三维点云数据。本文利用无控制移动激光隧道检测系统在地铁隧道进行测试,介绍其作业流程、数据处理方法及其应用。
2.无控制移动激光隧道检测系统
无控制方式的移动激光隧道检测系统,借助激光扫描仪在移动轨道小车平台上匀速运行,获得高质量的三维点云数据,检测速度支持高达4.5 km/h的作业速度;支持辅助里程计、轨距测量仪等传感器,提高了相对定位精度;能对隧道及周边实现全覆盖移动扫描,在露天或隧道内都可以正常使用;能进行断面、限界检测及正射影像生成,相比集成惯导的移动轨道扫描系统,大大降低了成本;采用无控制点联测方式,提升了外业检测效率。
移动激光隧道检测系统支持多种扫描仪,采用无控制点联测方式检测隧道相对变形,不需考虑轨道和隧道的整体沉降、轨道平顺性等变形特性,仅关注隧道空间结构的相对变化,可进行隧道的定期监测、保护区施工监测、成型隧道验收施工等,适用于隧道收敛检测线路管理维护竣工分析、限界测量、净空测量、病害检测等多个领域。
无控制移动隧道激光检测系统配套的隧道激光点云采集与处理软件是隧道激光扫描监控量测系统,主要有移动点云采集、隧道数据处理与成果分发功能。利用移动式三维激光扫描测量技术可快速获取隧道表面大量的点的三维坐标和图像灰度值等信息,对这些点云数据进行预处理与变形解算后,可以获得被扫描隧道的收敛直径、错台变形、内壁影像、漫游视频等量测成果,生成测量报表、断面CAD、病害报表等,为地铁盾构隧道施工及运营维护检测提供完整解决方案。图1为移动隧道检测作业流程。
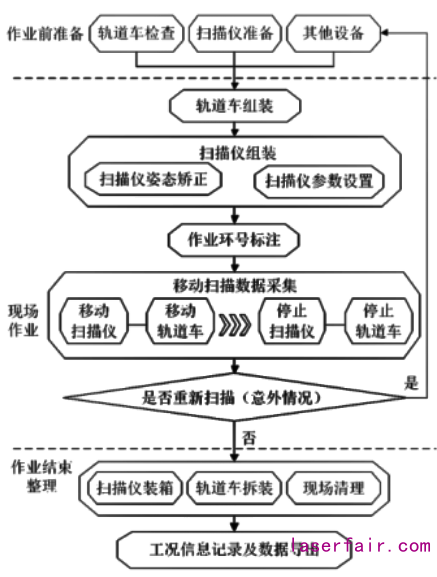
图1、移动隧道检测作业流程
数据处理主要包括点云影像预览、点云预处理、断面收敛变形分析、错台分析、净空检测、病害标注、隧道高清影像生成与实景漫游构建报表生成等工作内容。
3.隧道安全状态分析
本文以天津地铁安全检测项目为例,采用移动隧道检测系统对某一区间进行工程化测试,通过获取隧道全息全断面数据,进行隧道点云数据采集、断面变形解算(全断面变形分析和收敛直径计算)、错台分析、病害提取、隧道内壁和轨道影像生成漫游生成应用,对隧道断面、限界、病害等信息进行全方位的分析。
运营地铁隧道安全检测的内容主要包括隧道断面检测、限界检测及渗漏水等病害检测。在地铁隧道位置、结构的几何参数检测中,收敛和限界检测尤为重要。盾构隧道收敛变形检测主要结合隧道结构特征,进行稳健估计椭圆拟合,获得椭圆长半轴、短半轴、水平直径、椭圆度等信息。限界检测可结合实测点云扫描得到的轨面点云进行轨道面提取,解算轨面高程基准,建立轨面坐标系,并结合铁路设计相关规范提供的地铁列车或设备限界数据进行隧道断面限界检测以及接触网导高和拉出值拱顶净高的计算。
激光扫描数据具有“全覆盖、密度高”的特点,为便于后续深入分析,扫描后提供的全断面数据可导出成逐环全断面dxf文件,例如,收敛直径、环内错台、净空检测以及环间错台dxf成果文件,并标注环片拼接块的实际位置,方便查看和数据管理。
隧道激光扫描监控量测系统的解算成果分为全断面CAD图及统计报表(Excel表格),其中,统计报表主要包含整个数据的收敛直径、错台弧长、平均错台量等分析数据,可进行进一步分析应用。
对隧道内渗漏水发生的位置、分布及其面积等进行定量量测,主要采用该系统的隧道内壁影像功能。隧道现状影像的主要特点为高频次、高分辨率,相对于普通数码像机照片,具有全覆盖、精确量算和无需光照等优势,有利于及时发现隧道内的各项安全隐患,克服了人工巡检的漏检、非标准化、指标随意等缺点。本试验对应的内壁影像图局部放大如图2所示,从图中能够看到,结合激光扫描生成的高清隧道影像质量较高。
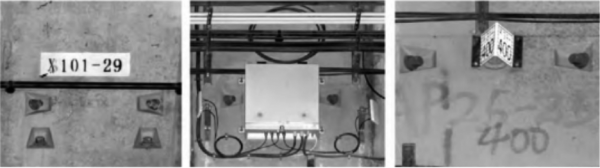
图2、高清影像局部放大图
为解决隧道扫描点云数据和解算成果的可视化难题,避免人工建模所需的大量人力,可利用扫描点云的XY坐标、里程、反射率信息以及检测成果直接生成三维漫游场景,并以第一人称生成漫游视频,将隧道现状、环号-里程、直径变形、错台、附属设施等关键信息融合到视颜中,相关人员可更全面地查看监控量测成果。
地铁隧道中最常见的病害是渗漏水,常规的渗漏水检测以人工拍摄巡检方式为主,数据成果量化、保存与共享比较困难。基于移动激光扫描方式获取隧道壁高精度、高密度的三维点云坐标信息及激光反射信号的强度信息,结合强度信息可对扫描目标的结构.材质、含水量等信息进行提取和反演,实现目标探测与识别。如图3所示,结合移动激光扫描获取的隧道点云数据生成的正射膨像强度图能給出渗漏水的儿何信息,如渗漏水的面积,弥补传统方法获取单一。几何数据的缺陷,便于病害成果的几何量测与数据管理。
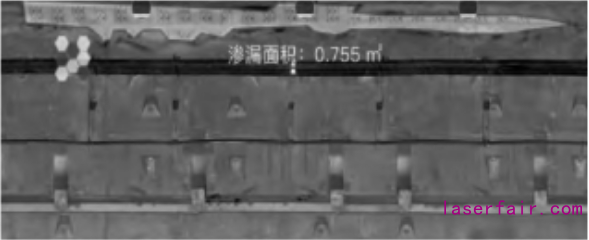
图3、隧道渗漏面积计算
4.结束语
结合移动激光隧道检测系统进行隧道安全状态检测,检测速度可支持最高4.5km/h的作业速度,能提高作业效率,提供全断面、收敛直径、环内错台、环间错台等变形检测成果表和CAD图,并进行表观膨像的初步识别和判读,制作隧道实景漫游视额。
移动激光隧道检测系统可采用无控制方式,对隧道进行移动式激光检测,适用于隧道结构相对变化检测,但对于一些绝对测量场最(如沉降监测、轨道平顺性检测),则需要增加惯性导航系统,并联测控制点。
实践结果表明,无控制方式的移动激光隧道检测系统可开展隧道结构病害的快速检测,在采集范围、影像分排率及采集效率方面具有一定的优势。通过激光扫措可获取隧道内壁高分辨率影像和漫游视频,便于相关专业人员直观清楚地了解隧道内壁的附属设施和病害现状,还可为后期的隧道综合调度指挥和结构病害分级跟踪管理提供工作底图,也可为后续线路的BIM信息化管理提供基础数据。建议在隧道竣工验收测量、监护项目结构调查、长期收敛测量以及应急抢险等特殊工况条件下的快速普查等项目中,开展无控制方式的移动激光隧道检测系统试验应用。来源:《测绘技术装备》





